El martes 26, en el auditorio de la Escuela de Oficiales de la Armada (ESOA), y en el marco de la Segunda Jornada de Vinculación Tecnológica (JOVITEC), se llevó a cabo la presentación de un robot de geo-referencia, capaz de operar en el continente antártico.
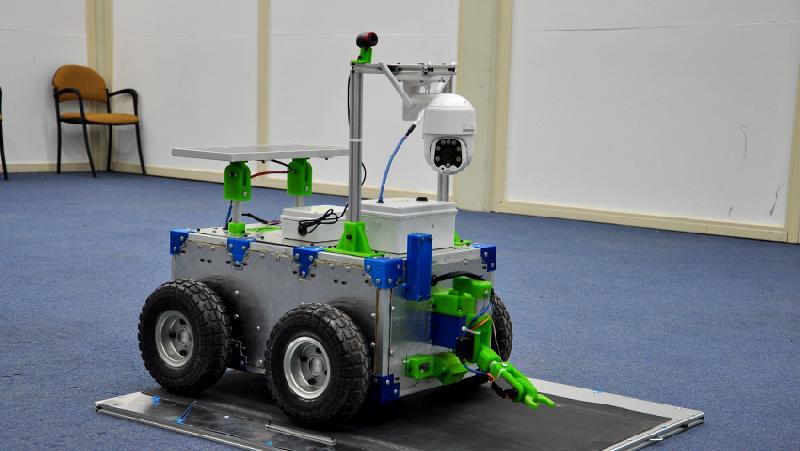
Se trata de una plataforma robótica móvil a ruedas, creada de forma modular (un módulo de sensores, uno de navegación, otro de control de un brazo mecánico y otro para una red neuronal de imágenes), capaz de tomar fotografías y filmaciones, con capacidad para diversos tipos de manipulación mediante un brazo frontal de movimientos múltiples.
El proyecto fue liderado por el Ingeniero Andrés García, quien es docente investigador de la ESOA especializado en electrónica y robótica (formado en Portugal) y doctorado en Control de Sistemas y quien está a cargo de la materia Sistemas de Control aplicado a Artillería.
El diseño del Ingeniero García y su equipo fue presentado a través de la ESOA a la Universidad para la Defensa (UNDEF) en el marco de la convocatoria de proyectos de investigación 2020/2021. Allí fue aprobado y financiado con un monto de dinero asignado este año, a partir del cual se comenzó con el desarrollo del prototipo a principios de mayo.
“Lo innovador es que posee dos formas diferentes de navegación. Una por control remoto, mediante un operador, y otra más avanzada que posee una inteligencia de navegación donde, mediante una aplicación de celular desarrollada específicamente para este robot, se le pueden cargar puntos geo-referenciales (latitud y longitud) de los lugares a visitar y el robot se desempeña de manera autónoma”, explicó García y continuó: “Para lograrlo utiliza un GPS y procesa a cada instante una triangulación posicional (llamada Harvester) mediante un proceso matemático de un micro controlador y teniendo en cuenta la curvatura de la Tierra (no una triangulación básica de Pitágoras). Es decir que el robot analiza en cada actualización on line del GPS el punto donde estaba, el punto donde está y el punto a donde tiene que ir, triangula la posición y corrige el rumbo”.
El robot, además, posee dos cámaras. Una que puede grabar de forma diurna o nocturna, tanto imagen como audio, mientras se mueve el robot, y también posee movimiento independiente en amplias direcciones. La segunda cámara, más compleja en su funcionamiento, está conectada a una red neuronal (tecnología desarrollada en el mundo recién en 2020) y a un software mediante el cual puede cargársele datos para que la cámara haga búsquedas y, cuando detecte el objetivo cargado, lo filme y/o fotografíe.
“A modo de ejemplo, se le puede cargar la imagen de una determinada especie de pingüino y puntos dónde deberá buscarlos y el robot se maneja de forma autónoma para ir a los lugares y, cuando esta cámara reconoce en el ambiente la imagen del pingüino cargada previamente, automáticamente inicia la captura de imágenes y las guarda”, comentó el Ingeniero García.
Para trasladarse en diversas direcciones, el robot posee un giro diferencial por el cual mediante la tracción de dos ruedas hacia un lado y dos hacia el otro a distintas velocidades, efectúa el giro para corregir su rumbo. En este mismo sentido, cuenta con sensores capaces de detectar obstáculos o pozos, que le permiten detenerse y recalcular las posibilidades de avanzar. También el prototipo, con muchas de sus piezas impresas en 3D, fue dotado de baterías especiales para trabajar a muy bajas temperaturas, que pueden cargarse mediante un panel solar incorporado, con alternativas de carga mediante una toma de 220v y otra de 12v.
Por su parte, el Director de la ESOA, Capitán de Navío Marcelo Valverde, destacó “la labor y dedicación de los docentes e investigadores de esta escuela, que año tras año presentan valiosas propuestas de trabajo y que plasman con éxito. Estas iniciativas se generan en el contexto del aula a partir de las inquietudes y la percepción de problemas operativos concretos presentados por los alumnos, que se incorporan a los equipos de trabajo, creando un círculo virtuoso entre las actividades académicas y las científico-tecnológicas”.
Culminada la Segunda JOVITEC, el Ingeniero García y su equipo ultimarán algunas pruebas de calibración y construirán la caja contenedora que permitirá transportar al robot durante la próxima Campaña Antártica de Verano, donde será probado por personal de la ESOA y del Instituto Antártico Argentino durante 21 días. Allí se registrarán datos de su comportamiento y funcionamiento, que permitirán ir efectuándole mejoras.
A futuro, y sobre la base modular creada para este robot antártico, el Ingeniero García y su equipo buscarán desarrollar otro robot, esta vez subacuático, con sistemas de posicionamiento y navegación más complejos, con sistema sonar y diversas capacidades de registro.









